Atlas 200I A2 加速模块集成了4个独立的CAN(Controller Area Network,控制器局域网)设备,可以与具有CAN接口的设备通讯,也可以多个芯片组成控制网络,实现信息的传输、交互和控制功能。CAN接口与UART部分接口存在接口复用关系,详细复用关系参考《PinMux配置表》。
管脚序号 |
加速模块信号名 |
信号方向 |
信号类型 |
信号电平 |
用途/描述 |
|---|---|---|---|---|---|
S67 |
UART2_TX |
Output |
LVCMOS |
1.8V |
复用为CAN_TX3,CAN3的发送数据线。 |
S68 |
UART2_RX |
Input |
LVCMOS |
1.8V |
复用为CAN_RX3,CAN3的接收数据线。 |
S69 |
UART2_RTX |
Input |
LVCMOS |
1.8V |
复用为CAN_RX2,CAN2的接收数据线。 |
S70 |
UART2_CTX |
Output |
LVCMOS |
1.8V |
复用为CAN_TX2,CAN2的发送数据线。 |
P123 |
UART3_TX |
Output |
LVCMOS |
1.8V |
复用为CAN_TX1,CAN1的发送数据线。 |
P124 |
UART3_RX |
Input |
LVCMOS |
1.8V |
复用为CAN_RX1,CAN1的接收数据线。 |
P125 |
UART3_RTX |
Input |
LVCMOS |
1.8V |
复用为CAN_RX0,CAN0的接收数据线。 |
P126 |
UART3_CTX |
Output |
LVCMOS |
1.8V |
复用为CAN_TX0,CAN0的发送数据线。 |
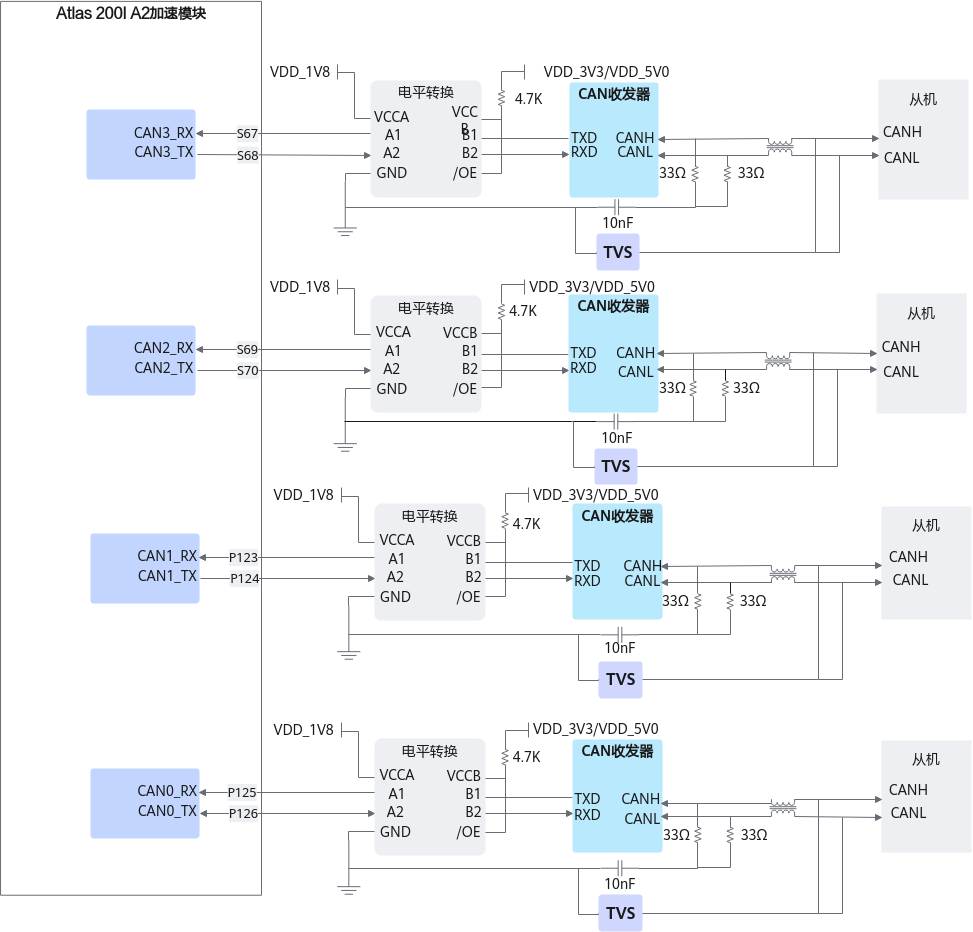
典型应用框图
图1 外设参考设计拓扑图
关键规格 |
规格要求 |
|---|---|
结电容 |
<900pF( I/O pin to GND) |
Breakdown Voltage |
Breakdown Voltage >6.45V |
Clamping Voltage |
Clamping Voltage <5.8V |