有了地图后,小车需要进一步了解此时此刻在地图中的初始位置。
- 在当前终端,执行如下指令。
ros2 launch ascend_slam localization_launch.py map:=./ascend_map_save.yaml use_sim_time:=false
再次查看RVIZ2可视化界面,可以看到当前小车变为白色,表示我们需要在当前地图中,给小车一个初始位置,如下图所示。
图1 初始化小车位置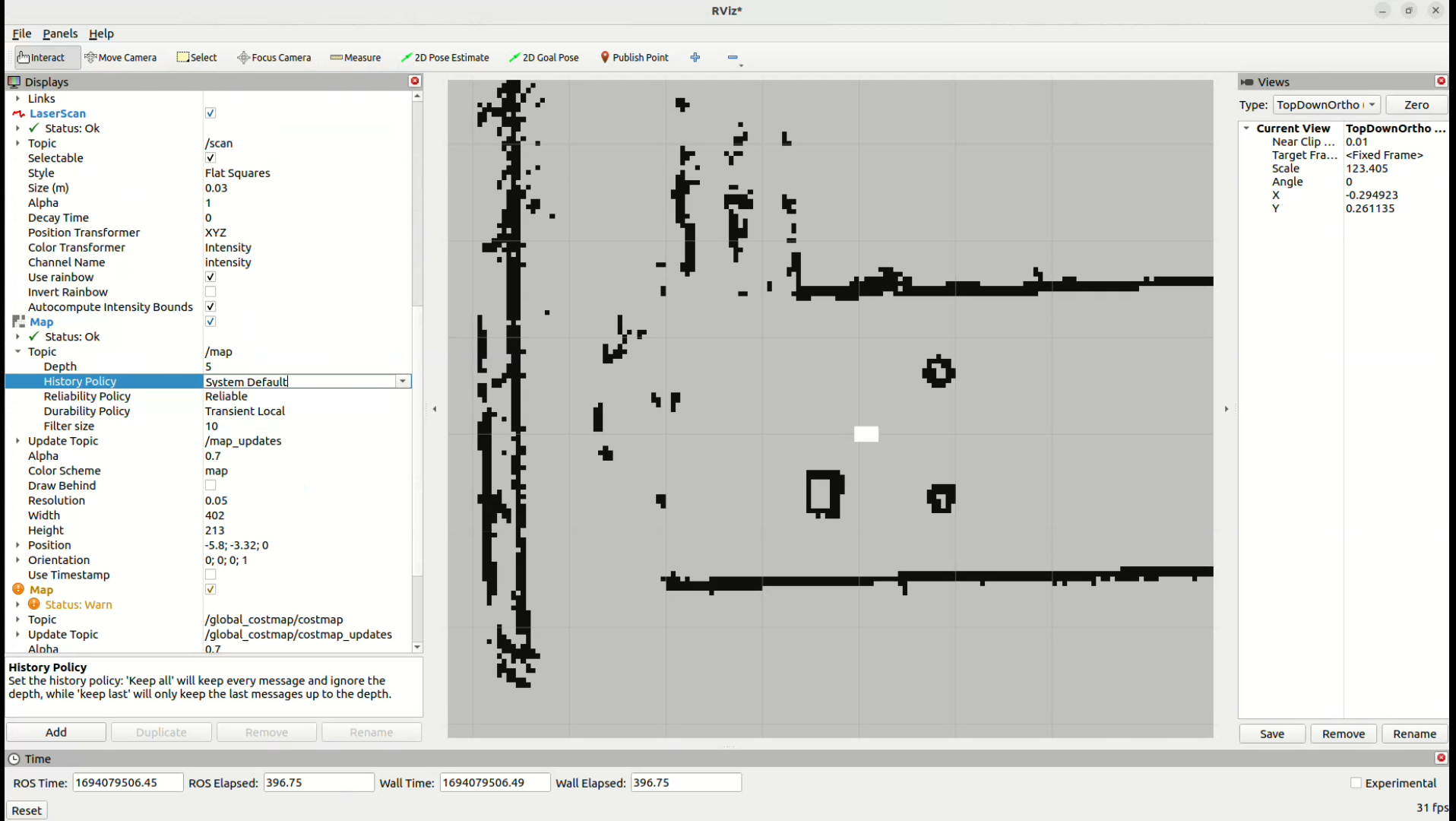
- 点击上方的“2D Pose Estimate”按钮,根据小车当前位置,判断在地图中的估计位置。
图2 点击按钮

- 单击地图,按住鼠标左键并拉动一个车头所对准的方向,松开鼠标。随后小车会根据箭头的位置和方向,出现在箭头指向的位置。
图3 初始化小车位置

如小车未出现在指定位置或未移动,可能由于多机通信网络原因,尝试重新单击“2D Pose Estimate”按钮并完成相应操作。