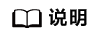
整网数据比对
使用场景
排除以上问题后,在训练网络精度仍未达预期时,通过采集训练过程中各算子的运算结果(即Dump数据),然后和业界标准算子(如TensorFlow)运算结果进行数据偏差对比,快速定位到具体算子的精度问题。主要过程为:
前提条件
基于GPU/CPU Dump标杆数据
利用TensorFlow的debug工具tfdbg_ascend生成npy文件。详细的操作方法如下:
- 修改tf训练脚本,在调起模型部分的训练脚本.py文件中修改配置。示例代码如下。
样例一:
- 导入debug插件。
1import tfdbg_ascend as dbg
- 在每个step训练启动代码前配置如下代码,例如dump第5个step的数据。
1 2 3 4
tfdbg.disable() if current_step == 5: tfdbg.enable() tfdbg.set_dump_path('home/test/gpu_dump')
样例二:- 导入debug插件。
1import tfdbg_ascend as dbg
- 例如dump第4个step的数据。dbg.enable不配置时,dump功能默认开启;dump路径不指定时,dump文件默认保存在训练脚本所在路径下。
1 2 3 4 5 6 7 8 9
class DumpConfig(tf.keras.callbacks.Callback): def __init__(self): super().__init__() def on_batch_begin(self, batch, logs={}): if batch == 4: dbg.enable() dbg.set_dump_path("/user/name1/pip_pkg/dump4") else: dbg.disable()
- 注册回调函数(define callbacks )。
1 2 3 4 5 6 7 8 9 10
# define callbacks callbacks = [ ModelCheckpoint( f'models/model_epochs-{epochs}_batch-{batch_size}_loss-{loss_function}_{Mask2FaceModel.get_datetime_string()}.h5'), LossHistory(batch_size), DumpConfig() ] # fit the model 调起模型的代码位置 history = self.model.fit(train_dataset, validation_data=valid_dataset, epochs=1, callbacks=callbacks, verbose=2)
- 导入debug插件。
- 执行训练脚本,训练任务停止后,在指定目录下生成*.npy文件。
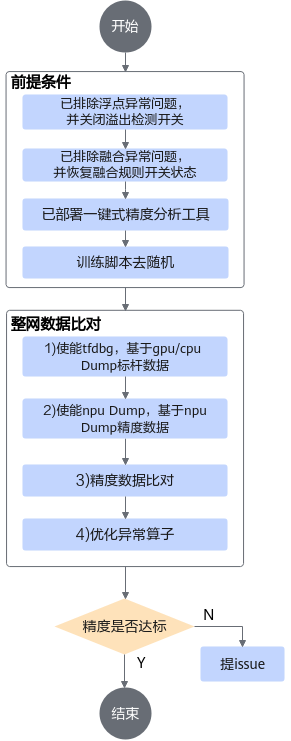
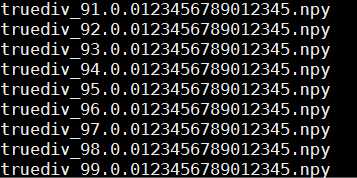
- 检查生成的npy文件命名是否符合规则,如图1所示。
- npy文件命名规则:{op_name}.{output_index}.{timestamp}.npy,其中op_name字段需满足“A-Za-z0-9_-”正则表达式规则,timestamp需满足[0-9]{1,255}正则表达式,output_index为0~9数字组成。
- 如果因算子名较长,造成按命名规则生成的npy文件名超过255字符而产生文件名异常,这类算子不支持精度比对。
基于NPU Dump精度数据
以下操作在NPU训练环境执行。Dump数据前,需要注意的是:
一般情况下,dump首个step的数据用作后续比对分析即可,为了避免随机权重导致比对不准确的问题,可以在训练开始前保存ckpt,并在训练时加载。如果确定是某个step的精度问题,则建议加载最靠近异常步的ckpt文件。
- 修改“precision_tool/lib/config”目录下的config.py文件,指定需要dump数据的step。
1 2
# dump特定step的数据,一般对比分析dump首层即可,即保持默认值,如需指定特定step可以修改,例如 '0|5|10' TF_DUMP_STEP = '0'
- 修改训练脚本,使能Dump数据采集。以下修改会同时生成Dump数据和Dump图,用于精度数据比对。
1 2
import precision_tool.tf_config as npu_tf_config npu_tf_config.npu_device_dump_config(npu_device, action='dump')
- 执行训练,会在precision_data/npu/debug_0目录下分别保存GE的Dump图和Dump数据文件。
精度数据比对
精度数据分析依赖CANN Toolkit软件包中的atc工具和msaccucmp.py工具,以下操作需要在CANN开发环境,即Toolkit安装环境进行。
- 将precision_tool和precision_data(包括标杆数据和NPU的精度数据)文件夹上传到Toolkit安装环境的任意目录下,目录结构示例:
├── precision_tool │ ├── cli.py │ ├── ... ├── precision_data │ ├── npu │ │ ├── debug_0 // 存放npu dump数据 │ ├── tf │ │ ├── dump // 存放标杆dump数据
- 安装Python依赖。
# graphviz为可选依赖,只有当需要绘制算子子图时才需要安装 pip3 install rich graphviz # ubuntu/Debian sudo apt-get install graphviz # fedora/CentOS sudo yum install graphviz
- 修改工具precision_tool/lib/config目录下的config.py。
# 依赖Toolkit包中的atc和msaccucmp.py工具,配置为Toolkit包安装目录 # 默认Toolkit包安装在/usr/local/Ascend,可以不用修改,指定目录安装则需要修改 CMD_ROOT_PATH = '/usr/local/Ascend'
- 启动PrecisionTool交互命令行。
python3 ./precision_tool/cli.py
进入交互命令行界面:
PrecisionTool >
- 执行ac -l [limit_num] (-c)命令进行整网精度比对。
PrecisionTool > ac -c
根据数据量大小,比对过程需要时间不同。
对比结果会以csv的格式存放在precision_data/temp/vector_compare目录中:
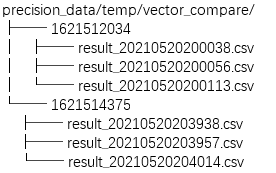
您可以直接打开csv文件进行分析,具体请参考整网精度比对结果文件说明。
- 除了直接打开csv文件进行精度分析外,您也可以使用vcs -f [file_name] -c [cos_sim_threshold] -l [limit]命令筛选比对结果。
vcs命令默认筛选余弦相似度小于0.98的结果,您也可以通过-c参数自定义阈值:
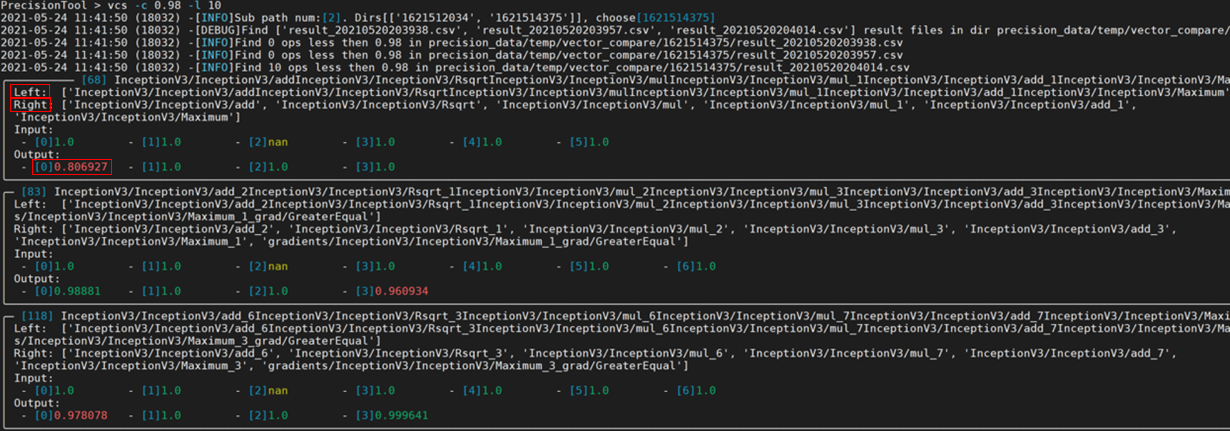
- Left:表示基于NPU运行生成的dump数据的算子名。
- Right:表示基于GPU/CPU运行生成的npy或dump数据的算子名。
- Input和Output:表示该算子各输入输出的余弦相似度算法比对结果,范围是[-1,1],比对的结果如果越接近1,表示两者的值越相近,越接近-1意味着两者的值越相反。
从上图的比对结果可以看到,算子的输入基本一致,但第一个输出与标杆存在明显差异(余弦相似度为0.806927,小于0.98),说明该算子可能存在精度问题。
当出现多个算子精度问题时,会出现N个异常算子信息,默认按照算子执行顺序排序,由于后面算子精度问题可能是因为前一个算子精度问题导致,建议用户优先分析第一个异常算子。
- 执行ni (-n) [op_name] -s [save sub graph deep]命令,可以查询异常算子的节点信息。

ni命令可以根据传入的算子名称,得到如下关键信息:
- 算子类型,以上图为例,算子类型为Add。
另外,PassName表示该算子为融合算子,对应值表示融合规则名称,OriginOp为融合前的算子,表明是由于算子融合导致精度问题。正常情况下,融合问题应该在浮点异常检测阶段解决。
- 自动解析Dump数据,打印Dump数据的基础信息(max/min/mean)。
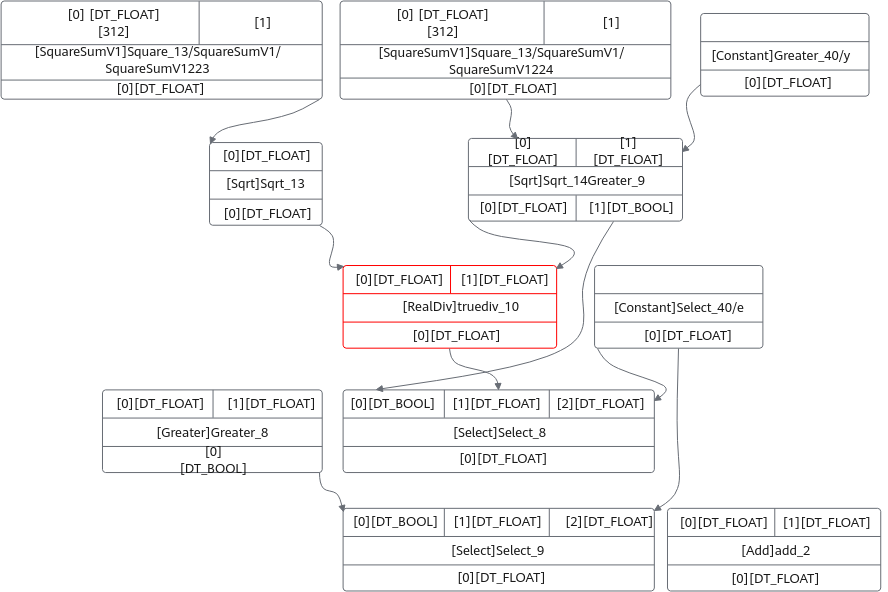
- 如果传入-s,则会保存一个以当前算子为中心,指定深度的子图结构,例如:
- 算子类型,以上图为例,算子类型为Add。
分析思路参考
整网数据比对提供了一个全网Dump数据与TF标杆数据的逐层累计比对报表,由于整网数据由于硬件差异本身是存在一定给误差的,且误差会随着层数增多而累计,即便精度正常的网络数值上也会存在细微误差,一般采用余弦相似度做初步的可疑算子筛选(注意:余弦相似度较高也不一定说明没有问题,但较低一般代表可能存在问题),精度对比结果可以给出一个大致的分析方向。
- 根据算子类型,可以判断该算子是否为用户自定义算子:
- 对于自定义算子,一般由用户自行分析算子的实现逻辑是否与标杆一致,可以ni命令提供的算子参数信息,以及dump数据进行单算子分析。
- 对于CANN内置算子,如果算子输入或输出类型为float16,则可以切换算子类型至float32计算,用户可以尝试以下两种方法:
- (推荐)方法一:通过性能调优的modify_mixlist修改混合精度模式算子黑白灰名单,调整算子精度模式。
- 方法二:通过npu.keep_dtype_scope接口,指定哪些算子保持原有精度。
1 2 3
import npu_device as npu with npu.keep_dtype_scope(): v = tf.add(1, 1)
- 如果依旧无法解决,欢迎到昇腾社区提issue求助。