硬件主控ESP32
ESP32 IOT&Robot Board (4Motor)物联网机器人开发板(4 电机),是一款以ESP-WROOM-32单片机为核心的物联网开发板。
图1 ESP32主控板接口
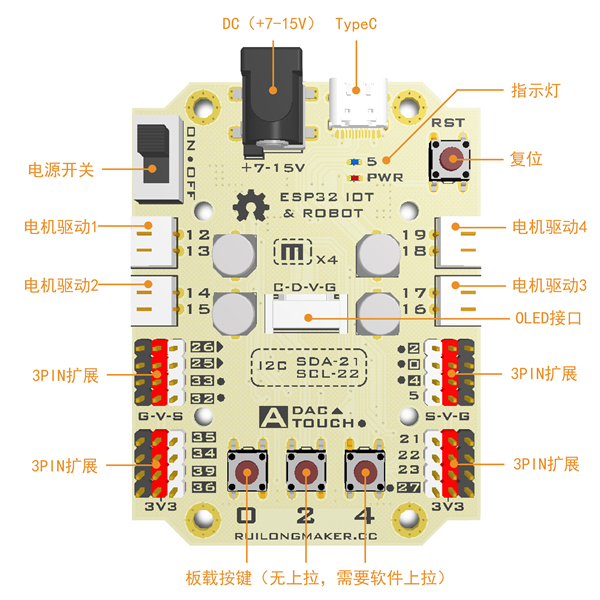
ESP32开发板能够处理数据和进行运算,最终通过引脚传递不同的电信号完成指令。通过不同引脚接入其他外设可以实现丰富的功能,更多详情及引脚定义可查看官方文档。
通过烧录控制程序可实现对外接传感器的感知和控制,常见的ESP32程序编译工具有Arduino、Mixly、MicroPython等,本文以Arduino工具为例。
参数 |
说明 |
|---|---|
主控板 |
ESP32单片机 |
处理器 |
Tensilica LX6双核处理器 |
主频 |
240Mhz时钟频率 |
SRAM |
520KB |
Flash |
8MB |
Wi-Fi标准 |
FCC/CE/TELEC/KCC |
Wi-Fi协议 |
8022.11 b/g/n/d/e/i/k/r,A-MPDU与A-MSDU聚合,支持0.4us防护问题 |
频率范围 |
2.4-2.5GHz |
蓝牙协议 |
符合蓝牙v4.2BR/EDR/BLE标准 |
供电方式 |
CVSD和SBC音频低功耗 10uA |
工作电压 |
Micro USB供电 |
最大工作电流 |
200mA |
父主题: 小车组成