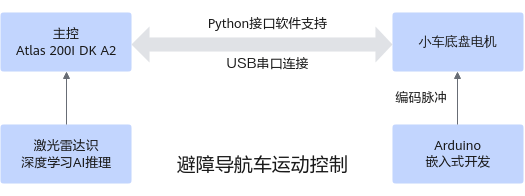
功能与原理介绍 避障导航车首先通过激光雷达在已布置好的障碍物场地中进行地图扫描,模拟出一张带有障碍物标记的地图,然后根据雷达定位自身在地图中的位置,采集环境数据后在开发者套件上进行AI推理,根据推理结果发出指令以及使用Arduino平台可以对其编码电机进行嵌入式开发,控制小车运动的同时避开障碍物形式。 图1 实现原理图 父主题: 样例介绍