'%20fill='%23C31D20'%20fill-rule='nonzero'%3e%3cpath%20d='M7.55269822,13.7609409%20C10.8552199,9.97176134%2014.2271223,7.63452926%2017.1034483,6.5677512%20L17.0816429,0.884990191%20C17.0593112,0.508963963%2016.8188535,0.182653682%2016.4703158,0.055395956%20C16.1217781,-0.0718617705%2015.7322263,0.0244201241%2015.4799397,0.300178022%20L12.9584465,3.07097775%20L0.368821458,17.4916392%20C0.0232151224,17.8857306%20-0.0894678188,18.437454%200.0732192079,18.9389805%20C0.235906234,19.4405071%200.649247199,19.815643%201.15754056,19.9230783%20C1.66583392,20.0305135%202.19185783,19.853926%202.53746417,19.4598346%20L7.5467513,13.7690073%20L7.55269822,13.7609409%20Z'%20id='路径'%3e%3c/path%3e%3cpath%20d='M10.6896552,12.0927463%20L15.1004089,17.5535201%20C15.4511303,17.8402432%2015.9409156,17.8973222%2016.3502521,17.6991755%20C16.7595885,17.5010287%2017.0117165,17.0848129%2016.993637,16.6370685%20L17.1034483,10.0202479%20C14.5615201,9.75868982%2012.477139,10.7130773%2010.6896552,12.0927463%20Z'%20id='路径'%3e%3c/path%3e%3c/g%3e%3crect%20id='矩形'%20x='0'%20y='0'%20width='24'%20height='24'%3e%3c/rect%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
CrossCoreSetFlag
功能说明
面向分离架构的核间同步控制接口。
该接口和CrossCoreWaitFlag接口配合使用。使用时需传入核间同步的标记ID(flagId), 每个ID对应一个初始值为0的计数器。执行CrossCoreSetFlag后ID对应的计数器增加1;执行CrossCoreWaitFlag时如果对应的计数器数值为0则阻塞不执行;如果对应的计数器大于0,则计数器减一,同时后续指令开始执行。
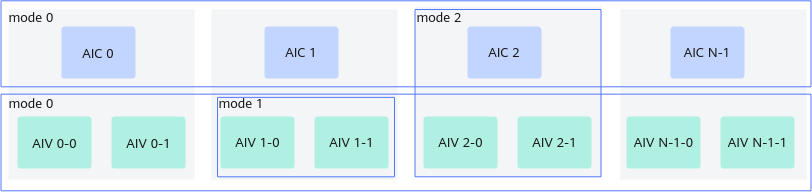
同步控制分为3种模式,如图1所示:
- 模式0:AI Core核间的同步控制。对于AIC场景,同步所有的AIC核,直到所有的AIC核都执行到CrossCoreSetFlag时,CrossCoreWaitFlag后续的指令才会执行;对于AIV场景, 同步所有的AIV核,直到所有的AIV核都执行到CrossCoreSetFlag时,CrossCoreWaitFlag后续的指令才会执行。
- 模式1:AI Core内部,AIV核之间的同步控制。如果两个AIV核都运行了CrossCoreSetFlag,CrossCoreWaitFlag后续的指令才会执行。
- 模式2:AI Core内部,AIC与AIV之间的同步控制。在AIC核执行CrossCoreSetFlag之后, 两个AIV上CrossCoreWaitFlag后续的指令才会继续执行;两个AIV都执行CrossCoreSetFlag后,AIC上CrossCoreWaitFlag后续的指令才能执行。
函数原型
template <uint8_t modeId, pipe_t pipe> __aicore__ inline void CrossCoreSetFlag(uint16_t flagId)
参数说明
参数名 |
描述 |
|---|---|
modeId |
核间同步的模式,取值范围为0~2。
|
pipe |
设置这条指令所在的流水类型,不支持PIPE_S和PIPE_ALL。 流水类型可参考表1。 |
参数名 |
输入/输出 |
描述 |
|---|---|---|
flagId |
输入 |
核间同步的标记,取值范围是0-10。 |
返回值
无
支持的型号
Atlas A2训练系列产品/Atlas 800I A2推理产品
约束说明
同一flagId的计数器最多设置16次。
调用示例
// 使用模式0的方式同步所有的AIV核
if (g_coreType == AIV) {
CrossCoreSetFlag<0x0, PIPE_MTE3>(0x3);
CrossCoreWaitFlag(0x3);
}
// 使用模式1的方式同步当前AICore内的所有AIV子核
if (g_coreType == AIV) {
CrossCoreSetFlag<0x1, PIPE_MTE3>(0x3);
CrossCoreWaitFlag(0x3);
}
// 注意:如果调用高阶API,无需开发者处理AIC和AIV的同步
// AIC侧做完Matmul计算后通知AIV进行后处理
if (g_coreType == AIC) {
// Matmul处理
CrossCoreSetFlag<0x2, PIPE_FIX>(0x3);
}
// AIV侧等待AIC Set消息, 进行Vector后处理
if (g_coreType == AIV) {
CrossCoreWaitFlag(0x3);
// Vector后处理
}
父主题: 同步控制
