编程范式
编程范式描述了算子实现的固定流程,基于编程范式进行编程,可以快速搭建算子实现的代码框架。
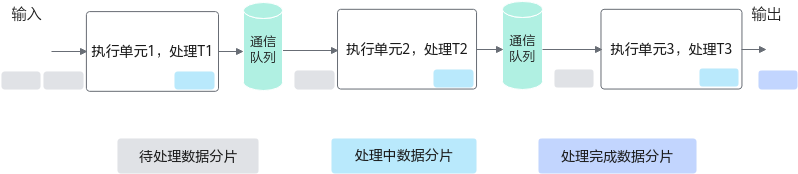
Ascend C编程范式就是这样一种流水线式的编程范式,把算子核内的处理程序,分成多个流水任务,通过队列(Queue)完成任务间通信和同步,并通过统一的资源管理模块(Pipe)来统一管理内存、事件等资源。
Vector编程范式
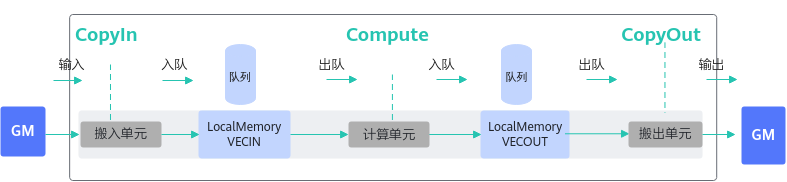
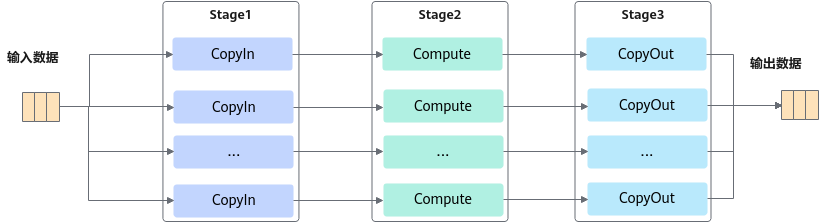
如上图所示,Vector编程范式把算子的实现流程分为3个基本任务:CopyIn,Compute,CopyOut。
- CopyIn负责搬入操作:将输入数据从Global Memory搬运到Local Memory(VECIN用于表达矢量计算搬入数据的存放位置),完成搬运后执行入队列操作;
- Compute负责矢量指令计算操作:完成队列出队后,从Local Memory获取数据并计算,计算完成后执行入队操作;
- CopyOut负责搬出操作:完成队列出队后,将计算结果从Local Memory(VECOUT用于表达矢量计算搬出数据的存放位置)搬运到GM。
上文中提到的VECIN/VECOUT是TPostition的概念。Ascend C管理不同层级的物理内存时,用一种抽象的逻辑位置(TPosition)来表达各级别的存储,代替了片上物理存储的概念,达到隐藏硬件架构的目的。除了VECIN/VECOUT,矢量编程中还会使用到VECCALC,一般在定义临时变量时使用此位置。这些TPostition与物理内存的映射关系如下表。
TPosition |
物理内存 |
|---|---|
GM |
Global Memory |
VECIN |
Unified Buffer |
VECOUT |
Unified Buffer |
VECCALC |
Unified Buffer |
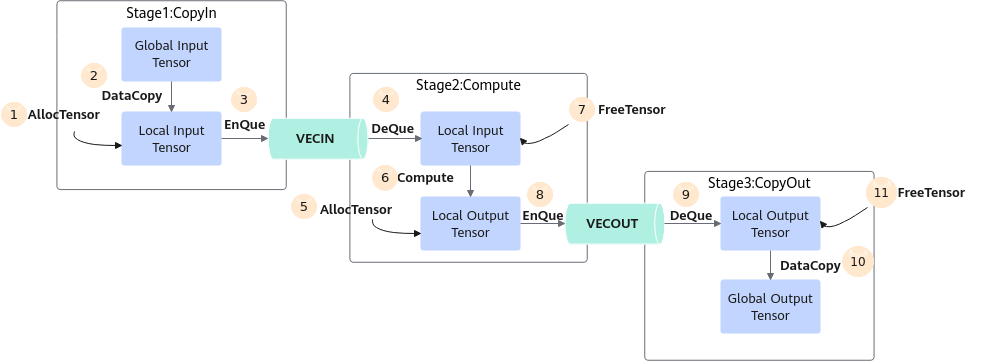
从编程的角度来讲,具体流程(如下文的伪代码)和流程图如下:
AscendC::TPipe pipe; //创建全局的资源管理
AscendC::TQue<AscendC::QuePosition::VecIn, 1> queIn; //创建CopyIn阶段的队列
AscendC::TQue<AscendC::QuePosition::VecOut, 1> queOut; //创建CopyOut阶段的队列
// Init 阶段:
pipe.InitBuffer(queIn, 2, 1024); // 开启double buffer,将待处理的数据一分为二,实现流水并行
for-loop {
//CopyIn 阶段{
auto tensor = queIn.AllocTensor<half>(); //从Que上申请资源, 长度1024
AscendC::DataCopy(tensor, gm, len); //搬运数据从GM到VECIN
queIn.EnQue(tensor);
}
//Compute阶段{
auto tensor = queIn.DeQue<half>();
auto tensorOut = queOut.AllocTensor<half>();
AscendC::Abs(tensorOut, tensor, 1024);
queIn.FreeTensor(tensor);
queOut.EnQue(tensorOut);
}
//CopyOut 阶段{
auto tensor = queOut.DeQue<half>();
AscendC::DataCopy(gmOut, tensor, 1024);
queOut.FreeTensor(tensor);
}
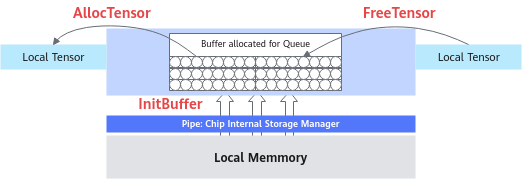
}任务间数据传递使用到的内存、事件等资源统一由管理模块Pipe进行管理。如下所示的内存管理示意图,TPipe通过InitBuffer接口对外提供Queue内存初始化功能,开发者可以通过该接口为指定的Queue分配内存。
Queue队列内存初始化完成后,需要使用内存时,通过调用AllocTensor来为LocalTensor分配内存,当创建的LocalTensor完成相关计算无需再使用时,再调用FreeTensor来回收LocalTensor的内存。
编程过程中使用到的临时变量内存同样通过Pipe进行管理。临时变量可以使用TBuf数据结构来申请指定TPosition上的存储空间。使用TBuf申请的内存空间只能参与计算,无法执行Queue队列的入队出队操作。具体的接口使用说明请参考TBuf。
按照上述编程范式进行编程即可实现单核上数据的并行处理。需要处理的数据被切分成n片,每个并行任务(Stage1、2、3)需要依次完成n个数据切片的处理。Stage间的箭头表达数据间的依赖关系,比如Stage1(CopyIn)处理完第一个数据分片之后,Stage2(Compute)才能对该分片进行处理。
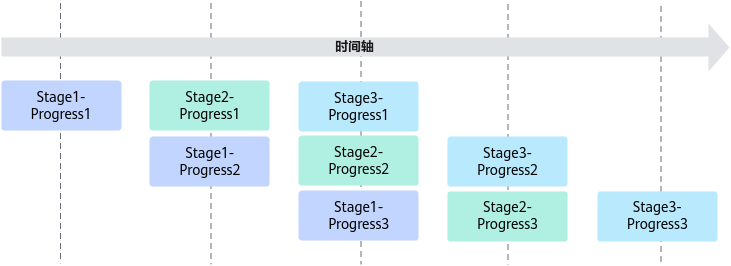
上图中的流水任务运行起来的示意图如下,Progress1、2、3代表处理的数据分片,从运行图中可以看出,对于同一片数据,Stage1、Stage2、Stage3之间的处理具有依赖关系,需要串行处理;不同的数据切片,同一时间点,可以有多个任务在并行处理,由此达到任务并行、提升性能的目的。
Cube编程范式
Cube计算的典型数据流图如下所示:
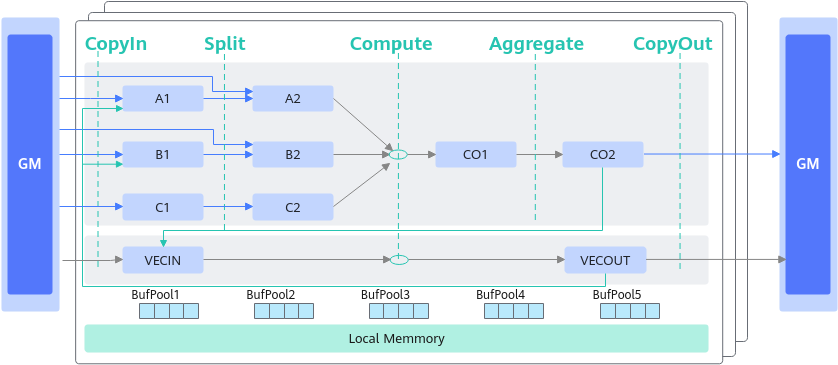
和矢量编程范式一样,同样也使用逻辑位置(TPosition)来表达数据流,Cube编程范式中主要使用的逻辑位置定义如下:
- 搬入数据的存放位置:A1,用于存放整块A矩阵,可类比CPU多级缓存中的二级缓存;
- 搬入数据的存放位置:B1,用于存放整块B矩阵,可类比CPU多级缓存中的二级缓存;
- 搬入数据的存放位置:A2,用于存放切分后的小块A矩阵,可类比CPU多级缓存中的一级缓存;
- 搬入数据的存放位置:B2,用于存放切分后的小块B矩阵,可类比CPU多级缓存中的一级缓存;
- 结果数据的存放位置:CO1,用于存放小块结果C矩阵,可理解为Cube Out;
- 结果数据的存放位置:CO2,用于存放整块结果C矩阵,可理解为Cube Out;
- 搬入数据的存放位置:VECIN,用于矢量计算,实际业务在数据搬入Vector计算单元时使用此位置;
- 搬入数据的存放位置:VECCALC,用于矢量计算,实际业务一般在计算需要临时变量时使用此位置;
- 搬出数据的存放位置:VECOUT,用于矢量计算,实际业务在将Vector计算单元结果搬出时使用此位置。
上述TPosition与物理内存的映射关系如下:
TPosition |
物理内存 |
|---|---|
GM |
Global Memory |
VECIN |
Unified Buffer |
VECCALC |
Unified Buffer |
VECOUT |
Unified Buffer |
A1 |
L1 Buffer |
A2 |
L0A Buffer |
B1 |
L1 Buffer |
B2 |
L0B Buffer |
C1 |
Atlas 训练系列产品,Unified Buffer。 Atlas推理系列产品AI Core,Unified Buffer。 Atlas A2训练系列产品/Atlas 800I A2推理产品,L1 Buffer。 |
C2 |
Atlas 训练系列产品,L0C Buffer。 Atlas推理系列产品AI Core,L0C Buffer。 Atlas A2训练系列产品/Atlas 800I A2推理产品,BT Buffer。 |
CO1 |
L0C Buffer |
CO2 |
Atlas 训练系列产品,Unified Buffer。 Atlas推理系列产品AI Core,Unified Buffer。 Atlas A2训练系列产品/Atlas 800I A2推理产品,Global Memory。 |
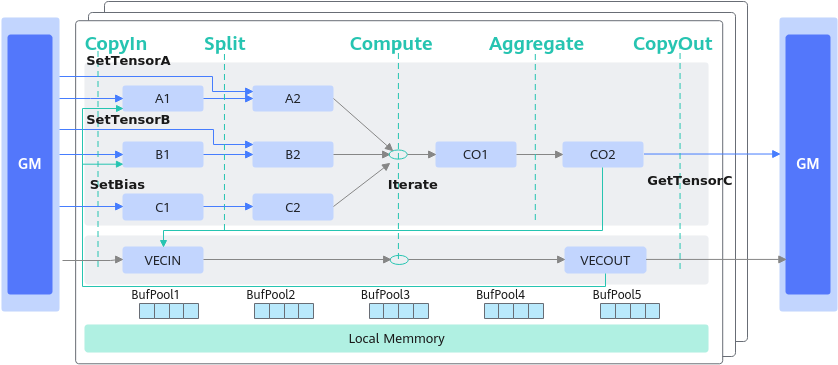
Cube计算流程同样也可以理解为CopyIn、Compute、CopyOut这几个阶段,因为流程相对复杂,Matmul高阶API提供对此的高阶封装,编程范式如下:
具体流程可参考如下示例:
// 创建Matmul对象 创建对象时需要传入A、B、C、Bias的参数类型信息, 类型信息通过MatmulType来定义,包括:内存逻辑位置、数据格式、数据类型。
typedef MatmulType<TPosition::GM, CubeFormat::ND, half> aType;
typedef MatmulType<TPosition::GM, CubeFormat::ND, half> bType;
typedef MatmulType<TPosition::GM, CubeFormat::ND, float> cType;
typedef MatmulType<TPosition::GM, CubeFormat::ND, float> biasType;
Matmul<aType, bType, cType, biasType> mm;
REGIST_MATMUL_OBJ(&pipe, GetSysWorkSpacePtr(), mm, &tiling); // 初始化
// CopyIn阶段:完成从GM到LocalMemory的搬运
mm.SetTensorA(gm_a); // 设置左矩阵A
mm.SetTensorB(gm_b); // 设置右矩阵B
mm.SetBias(gm_bias); // 设置Bias
// Compute阶段:完成矩阵乘计算
while (mm.Iterate()) {
// CopyOut阶段:完成从LocalMemory到GM的搬运
mm.GetTensorC(gm_c);
}
// 结束矩阵乘操作
mm.End();
融合算子编程范式
支持Vector与Cube混合计算的算子称之为融合算子。Ascend C提供融合算子的编程范式,方便开发者基于该范式表达融合算子的数据流,快速实现自己的融合算子。
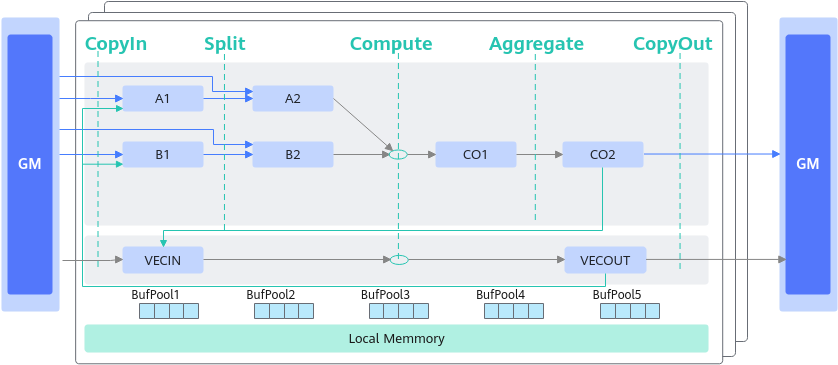
融合算子数据流指融合算子的输入输出在各存储位置间的流向。以一个典型的Cube和Vector融合算子为例,逻辑位置间的数据流向如下图所示(为了简化描述,没有列出bias):
- Cube的输出可以作为Vector的输入:CO2->VECIN
- Vector的输出可以作为Cube的输入:VECOUT->A1->A2、VECOUT->B1->B2
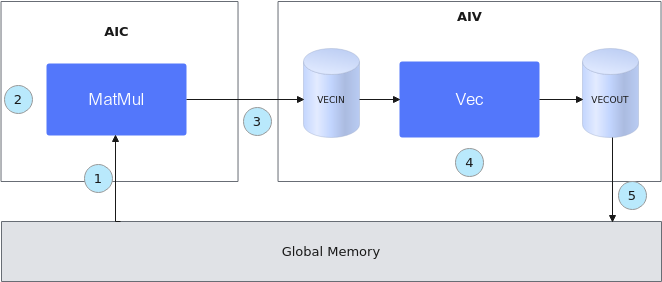
- 初始化一个MatMul对象,将输入数据从Global Memory搬运到Cube核上。
- 进行MatMul内部的计算。
- 将MatMul的计算结果搬运到Vector核上。
- 进行Vector矢量计算。
- 将输出结果搬运到Global Memory上。
整个过程的示例代码如下(伪代码):
template<typename aType, typename bType, typename cType, typename biasType>
__aicore__ inline void MatmulLeakyKernel<aType, bType, cType, biasType>::Process()
{
// 步骤1:初始化一个MatMul对象,将输入数据从Global Memory搬运到Cube核上。
uint32_t computeRound = 0;
REGIST_MATMUL_OBJ(&pipe, GetSysWorkSpacePtr(), matmulObj);
matmulObj.Init(&tiling);
matmulObj.SetTensorA(aGlobal);
matmulObj.SetTensorB(bGlobal);
matmulObj.SetBias(biasGlobal);
while (matmulObj.template Iterate<true>()) { // 步骤2:进行MatMul内部的计算。
// 步骤3:将MatMul的计算结果搬运到Vector核上。
reluOutLocal = reluOutQueue_.AllocTensor<cType>();
matmulObj.template GetTensorC<true>(reluOutLocal, false, true);
// 步骤4:进行Vector矢量计算。
AscendC::LeakyRelu(reluOutLocal, reluOutLocal, (cType)alpha, tiling.baseM * tiling.baseN);
reluOutQueue_.EnQue(reluOutLocal);
// 步骤5:将输出结果搬运到Global Memory上
reluOutQueue_.DeQue<cType>();
...
AscendC::DataCopy(cGlobal[startOffset], reluOutLocal, copyParam);
reluOutQueue_.FreeTensor(reluOutLocal);
computeRound++;
}
matmulObj.End();
}
编程模型背后的奥秘
由上文可知,Ascend C的并行编程范式核心要素是:一组并行计算任务、通过队列实现任务之间的通信和同步、开发者自主表达对并行计算任务和资源的调度。本节介绍编程模型的实现原理,作为扩展阅读,便于开发者更好的理解编程模型的设计思路和优势,对于后续的深度开发也会有所帮助。
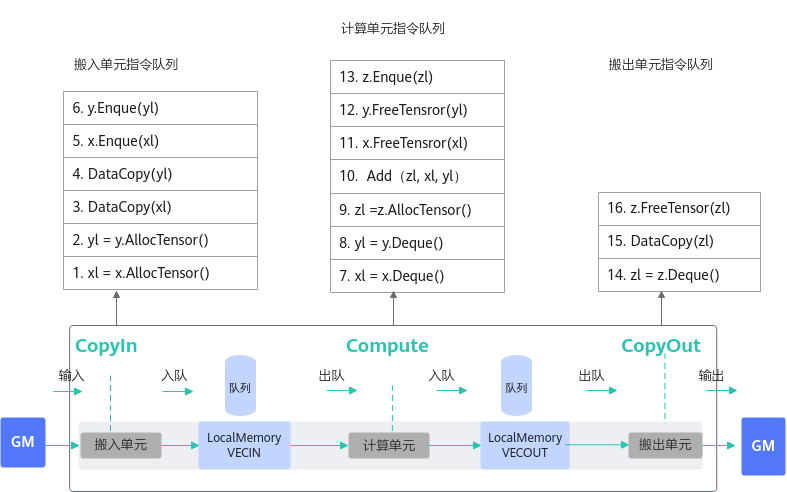
每个并行任务Stage的编程范式如下:
- 获取Local Memory的内存,调用AllocTensor申请内存,或者从上游队列DeQue一块内存数据。
- 完成计算或者数据搬运。
- 把上一步处理好的数据调用EnQue入队。
- 调用FreeTensor释放不再需要的内存。
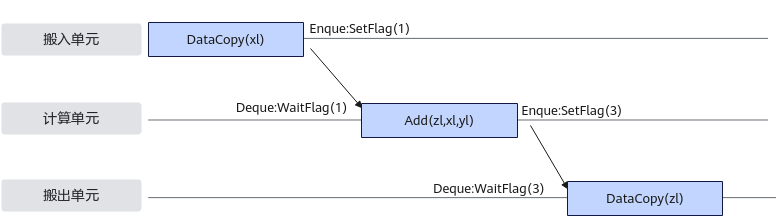
以最简单的矢量编程范式为例,在调用上述接口时,实际上会给各执行单元下发一些指令,如下图所示:
- EnQue/DeQue的具体处理流程:
- 标量执行单元读取算子指令序列
- 把这些指令发射到对应的执行单元的指令队列
- 各个执行单元并行执行这些指令序列
- EnQue/DeQue解决对内存的写后读问题
- EnQue调用会发射同步指令set,发送信号激活wait
- DeQue调用会发射同步指令wait,等待数据写入完成
- wait需要等到set信号才能执行否则阻塞
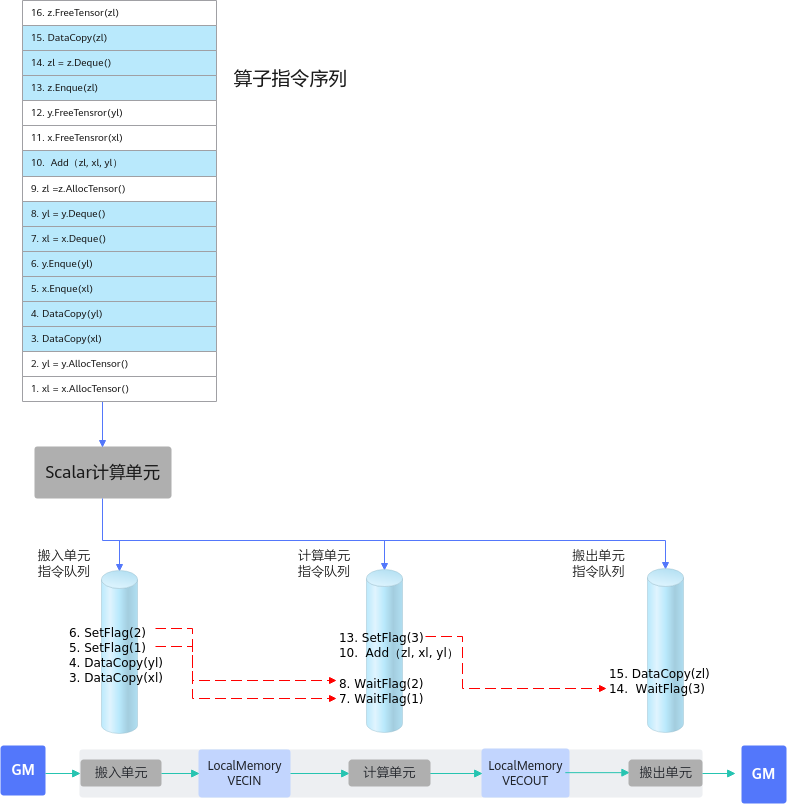
由此可以看出,EnQue/DeQue主要解决了存在数据依赖时,并行执行单元的写后读同步控制问题。
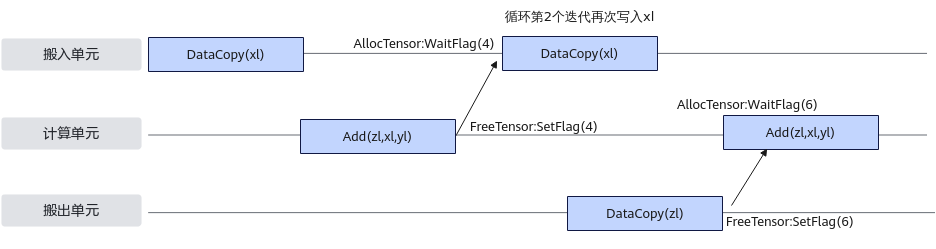
- AllocTensor/FreeTensor的具体处理流程
- 标量执行单元读取算子指令序列
- 把这些指令发射到对应的执行单元的指令队列
- 各个执行单元并行执行这些指令序列
- AllocTensor/FreeTensor,解决对内存的读后写问题
- AllocTensor调用会发射同步指令wait等待内存被读完成
- FreeTensor调用会发射同步指令set,通知内存释放,可以重复写
- wait需要等到set信号才能执行否则阻塞
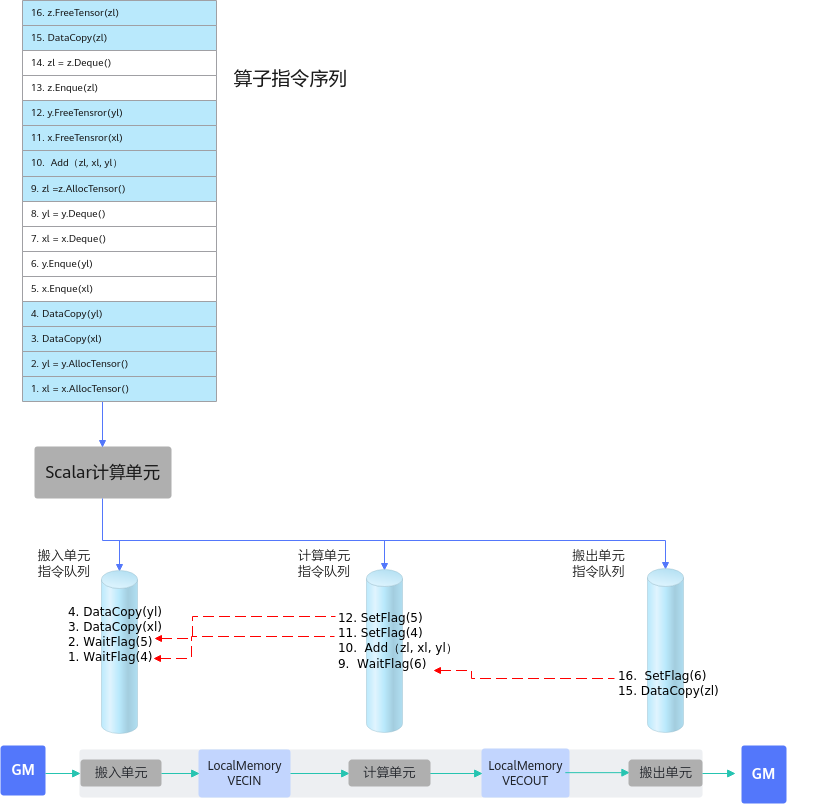
由此可以看出,AllocTensor/FreeTensor主要解决了存在数据依赖时,并行执行单元的读后写同步控制问题。
通过上文的详细说明,可以看出异步并行程序需要考虑复杂的同步控制,而Ascend C编程模型将这些流程进行了封装,同时对外界面上通过EnQue/DeQue/AllocTensor/FreeTensor这种开发者熟悉的资源控制方式来体现,同时达到了简化编程和易于理解的目的。